
Introduction
Electric motors are used to operate pumps, generators, compressors, fans, blowers, and other equipment. The history of electric motors began in 1820, when a Danish physicist, Hans Christian Oersted, discovered that a wire generates a magnetic field when an electric current is passed through it. The discovery of the principle of electromagnetism opened up a new scientific field. In 1825, an Englishman, William Sturgeon, wrapped a wire around an iron bar and generated a much stronger magnetic field. As scientists learned about this new discovery, a number of improvements were made to the electromagnet. By 1831, an English chemist named Michael Faraday had discovered that when a conductor is passed through a magnetic field electric current flows through the conductor. This discovery led to the invention of the electric generator.

The operation of electric motor is based on three scientific principles: electric current creates a magnetic field; unlike magnetic poles attract and like magnetic poles repel each other; and current direction determines the magnetic poles. An electric motor consists of a stationary magnet (stator) and a rotating conductor (rotor). A permanent magnetic field is formed by the lines of force between the poles of the stationary magnet.
Classification

Electric motors can be classified as either DC or AC.
DC Motors

In a DC motor, a conductor (armature) is located between the north and south poles of a stationary magnet (field structure). A commutator is used to reverse the direction of current, helping transmit current between the power source and armature. The armature is a cylindrical device attached to a driveshaft that is designed to become an electromagnet when current is passed through it. During operation, the armature rotates through the magnetic fields. At set intervals, the rotation cuts across the magnetic fields, reversing current flow. This process occurs on each half rotation of the armature. The field structure provides a magnetic field for the armature to move through. Magnetic fields are composed of lines of force. In DC motors, the terms field structure, field magnet, and field coils may be used to represent the stationary magnet. When electricity passes through the conductor in a DC motor, the conductor becomes an electromagnet and generates another magnetic field inside the original lines of force. As the twin fields increase in intensity, they strengthen each other and push against the conductor. The current and these strong magnetic fields determine the direction of rotation in a DC motor.
AC Motors

The rotor in an AC motor is a slotted iron core. Copper bars are fitted into the slots. Two thick copper rings hold the bars in place. Unlike a DC motor, electric current in an AC motor is not run directly to the rotor. Alternating current flows into the stator, producing a rotating magnetic field. The stator artificially creates an electric current in the rotor, which generates the second magnetic field. When the two fields interact, the rotor turns. A typical AC motor is composed of a stator, field coils, field magnet, rotor, shaft, bearings and seals, conduit box, frame, fan, shroud, and AC power source.
One of the first considerations in motor selection is to choose between a squirrel cage induction and a synchronous motor. The induction motor has the advantage of simplicity. It is a rugged machine and has an outstanding record for dependability. In general it can accelerate higher load inertias than synchronous motors and usually will do so in less time. Induction motor control is simple and no excitation equipment is required. Its principal disadvantages are that it operates at lagging power factor and has higher inrush (starting) current. Up to about 5000 horsepower, induction motors are normally preferred. Above this, induction and synchronous motor costs converge, and synchronous motors are often chosen.
The constant-speed synchronous motor has inherent advantages that often make it the logical choice for industrial drive applications at lower power ratings. Load speed can be exact. Torque characteristics of the motor can be varied by design to match the requirements of the driven load and the available power supply. Starting, pull-in, and pull-out torques can be selected over a wide range. Power factor improvement is available with rated power factor of unity, leading, or even lagging.
AC Induction Motors


In general, induction motors tend to draw more starting current at a lower power factor than synchronous motors of the same size and speed. This results in a greater voltage drop on the system when the motor is started. If the motor is driving a high inertia load, such as a fan or compressor, the lower terminal voltage will increase the temperature rise of the squirrel cage winding during acceleration. As a rule of thumb, voltage drops on starting greater than 20% may require special motor designs. These designs may reduce the full load efficiency of the motor during normal operation by one or two percent. It is best to furnish a power supply that will limit the voltage drop to 20% or less when starting the largest motor on a fully loaded bus.
Once started the induction motor is a stable machine. Most motors can easily ride through a 25 to 30% dip in system voltage caused by external faults or switching. Overall system stability and continuity may be achieved by using large induction motors. This is, however, accomplished at the expense of lower power factor and efficiency.
AC Synchronous Motors

The synchronous motor is usually easier to start than an induction machine. The system voltage drop on starting is less for a given horsepower motor. However, synchronous motors have less thermal capacity in their windings and may be more severely taxed when accelerating high inertia loads.
Once synchronized and running, synchronous motors present special system problems. They may tend to pull out of synchronism on voltage dips that induction motors can ride through. A gradually increasing load from zero to 125% of rated load will be easily accommodated. A suddenly applied load of 125% can easily cause the motor to pull out of synchronism with the electrical system.
When applying large synchronous machines to a system it is important to perform a transient load study. This will help ascertain if the electrical system is capable of upporting the motor demands under transient conditions.
Nameplate
Motor nameplate is normally located on all produced electric motors.It contains some information (according to NEMA) about the Motor.
NEMA (National Electrical Manufacturers Association):provides a forum for the standardization of electrical equipment, enabling consumers to select from a range of safe, effective, and compatible electrical products. NEMA publishes over 500 standards.
- Voltage
This data tells you at which voltage the motor is made to operate. Nameplate-defined parameters for the motor such as power factor, efficiency, torque and current are at rated voltage and frequency. When the motor is used at other voltages than the voltage indicated on the nameplate, its performance will be affected.
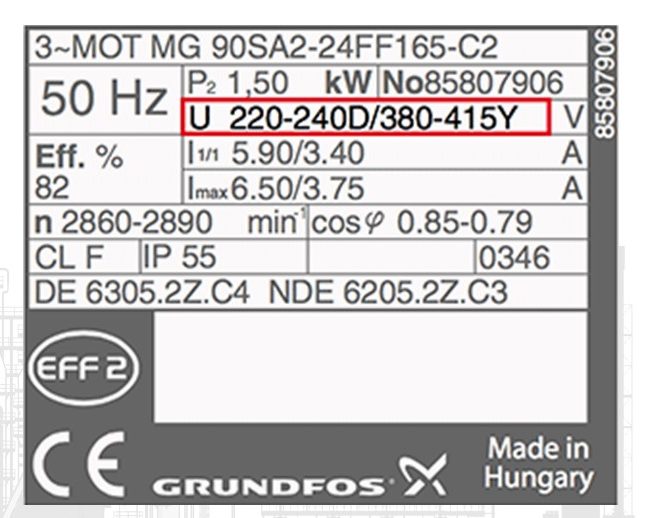
- Frequency
is the number of occurrences of a repeating event per unit time. Unit Hertz. Usually for motors, the input frequency is 50 or 60 Hz.

- Phase
This parameter represents the number of AC power lines that supply the motor. Single-phase and three-phase are considered as the standard.

- Current
Current indicated on the nameplate corresponds to the rated power output together with voltage and frequency.

- Power Factor
is indicated on the nameplate as either “PF”or “P .F”or cos φ . Power factor is an expression of the ratio of active power (W) to apparent power (VA) expressed as a percentage. Numerically expressed, power factor is equal to cosine of the angle of lag of the input current with respect to its voltage.

- KW or horsepower
is an expression of the motor’s mechanical output rating – that is it’s ability to deliver the torque needed for the load at rated speed.

- Full-load Speed
Full-load speed is the speed at which rated full-load torque is delivered at rated power output. Normally, the full-load speed is given in RPM. This speed is sometimes called slip-speed or actual rotor speed.
- Efficiency
Efficiency is the motor’s output power divided by its input power multiplied by 100. Efficiency is expressed as a percentage. Efficiency is guaranteed by the manufacturer to be within a certain tolerance band, which varies depending on the design standard, eg IEC or NEMA.
- Enclosure
classifies a motor as to its degree of protection from its environment and its method of cooling. Enclosure is shown as IP or ENCL on the nameplate.

P&ID Symbols

Resources
References
1-ENGINEERING DATA BOOK by Gas Processors Suppliers Association
2-Process Technology - Equipment and Systems by Charles E. Thomas
Has one comment to “Electric Motors”
You can leave a reply or Trackback this post.
admin - July 18, 2017 at 4:55 pm
So, As a Chemical Engineer, What do you think about Electric Motors?